

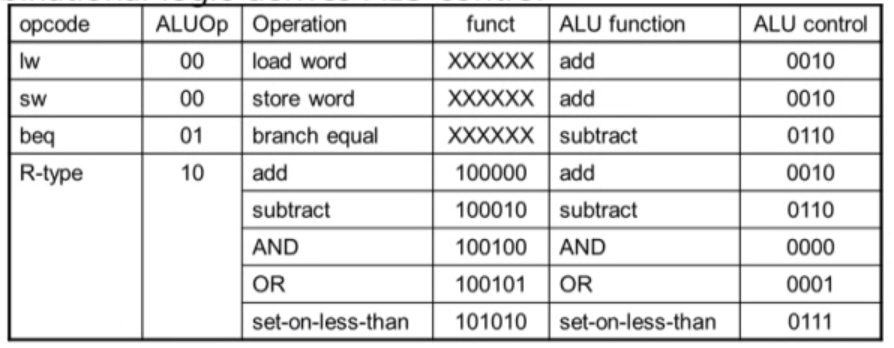
명령어의 opcode와 funct를 카르노맵을 이용해서 ALU control을 생성
모든 Control Signal은 명령어를 통해 만들어 짐
DataPath With Control
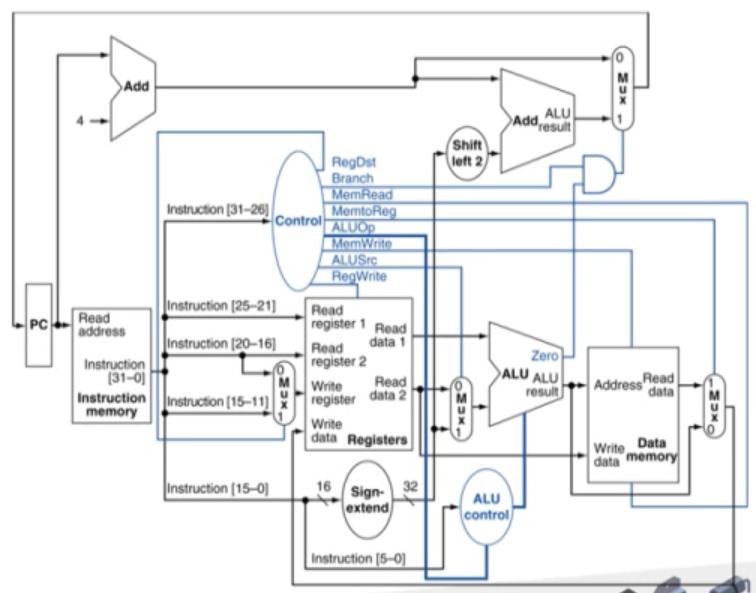
- 메모리에서 명령어를 읽음
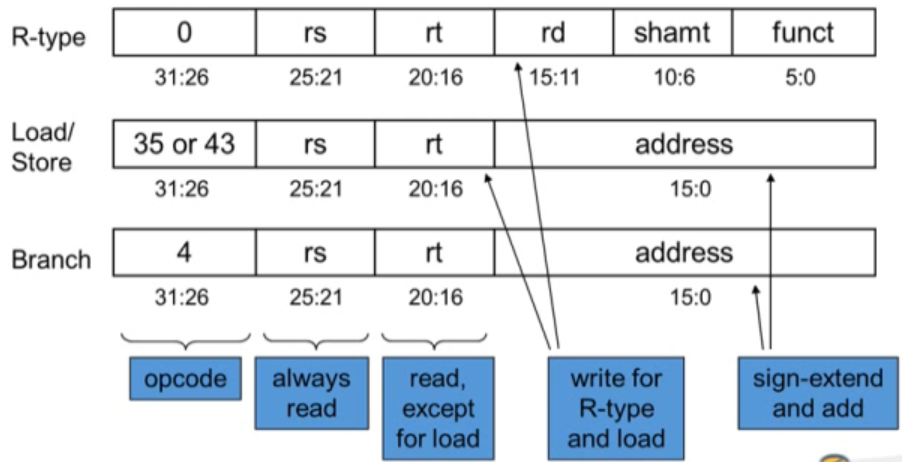
- 명령어의 상위 6비트가 Control의 input으로 들어감
- 그 중 ALUOP는 ALU Control의 input으로 들어 감
- 명령어의 하위 6비트(funct)가 ALU Control의 input으로 들어 감
- ALU Control에서 ALUOP와 funct가 조합되어 ALUControl (4bit)이 조합되어 ALU의 input에 들어감
Performance Issues
clock period는 delay가 가장 긴 명령어에 의해 결정 됨
가장 delay가 긴 명령어는 load 명령어
Instruction memory → register file → ALU → data memory → register file 순으로 작동하기 때문
그러나 load 명령어는 자주 사용되는 명령어가 아님. arthimetic 명령어가 더 자주 사용됨. 따라서 자주 사용하지 않지만 load명령어에 의해 성능이 하락.
이 문제를 해결하기 위해 pipeline을 이용함.
'컴퓨터 구조' 카테고리의 다른 글
| Hazard (0) | 2023.09.24 |
|---|---|
| Pipeline의 개념과 성능 (0) | 2023.07.11 |
| 프로세서의 명령어 실행 과정 (0) | 2023.07.07 |
| 실수의 표현과 연산 (0) | 2023.07.06 |
| 사칙연산 원리 (0) | 2023.07.05 |